
- 概要
- 開発事例
空間把握・空間再構成・物体認識・NUI開発等を必要とされているお客さまに、技術コンサルティング・技術評価・ソフトウェア開発等の支援を行います。
サービス内容
RGB-D画像(カメラ画像+デプスマップ)の利活用に際して、市販の3次元画像処理ツールでは解決困難な課題をお持ちのお客さまに、3次元画像処理のエキスパートが解決方法をご提案いたします。また、点群の生成、各種画像・点群処理、物体認識、多視点映像からの全方位映像の生成といった技術課題に対して、技術開発、技術評価からソフトウェア開発、システム構築までをトータルに支援いたします。
目的 (例)
左右スクロールで表全体を閲覧できます
|
|
技術課題(例)
左右スクロールで表全体を閲覧できます
3次元画像処理・3次元点群処理
|
実用化
|
課題解決の流れ(例)
サービスメニュー
左右スクロールで表全体を閲覧できます
|
|
技術分野
3次元画像処理・3次元点群処理
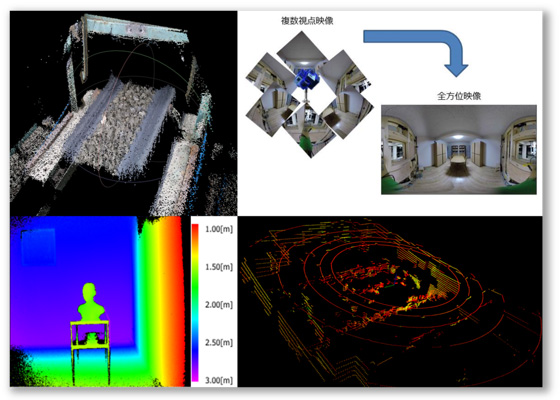
近年、Kinect™に代表される低価格の3Dセンサー搭載デバイスの登場により、カラー画像(RGB)に加えてデプスマップ(D)を低コストで取得できるようになりました。デプスマップ(または距離画像・深度マップ)とは、3Dセンサーから対象物までの距離情報を画素値とする画像(上図左下)のことです。また、VRヘッドマウントディスプレイや3Dプリンターなど、3次元データを出力するデバイスの性能向上や低価格化が進み、3次元データの利活用が身近なものとなってきています。
しかし、このようなデバイスを用いてシステムやアプリケーションを構築しようとすると、センサーの選定や、撮影環境の整備、3次元データの取り扱い等、多くの検討項目に直面することとなります。
当社では、点群データやデプスマップ、全方位映像といった3次元データに関わるお客様のさまざまな課題を、3次元画像処理や、点群処理、各種センサーのキャリブレーション、機械学習の利用などといった技術的なアプローチで解決いたします。
- 1.空間再構成
多視点映像やRGBカメラと3Dセンサーの組み合わせなど様々な条件下において空間を再構成します。 - 2.環境認識
再構成した3次元空間を用いて、周囲の環境・状況を認識し、障害物等を把握します。 - 3.自己位置推定
既知座標にあるランドマーク等の情報を使い、移動体に取り付けた3Dセンサーの現在座標を推定します。 - 4.環境地図作成
撮影されたデータと位置情報から、2次元または3次元の環境地図を作成します。 - 5.SLAM(Simultaneous Localization and Mapping)
移動しながら連続的に自己位置推定と、環境地図生成を行います。 - 6.センサーキャリブレーション
光学カメラ、RGB-Dセンサー等、センサー単体のキャリブレーションや、多視点カメラ、複数RGB-Dカメラ、RGBカメラとLRFの組み合わせ等、複数センサー間のキャリブレーションを行います。 - 7.Virtual Reality
コンピュータ上に生成した仮想的な空間に、3次元点群や、全方位映像を配置することで3次元空間を再現します。さらにVRヘッドマウントディスプレイを用いた提示を行うことで、高い没入感を実現します。 - 8.形状・距離計測、3次元データ編集
対象物の形状や距離を計測します。また、測定された3次元データの形状変形や、ノイズ除去、スムージング、データサイズ圧縮等をします。 - 9.3次元物体・人物認識
撮影したデータから3次元的な形状を認識し、人物認証や物体認識を行います。また、人物の姿勢や動き、顔の向き等を認識します。 - 10.NUI(Natural User Interface)
マウスやキーボード操作に替わって、機器に触れずに身体や顔の動きでコンピュータ等の操作を行います。
デバイス例
左右スクロールで表全体を閲覧できます
| 用途 | 製品名等 |
|---|---|
| 3次元計測・撮影 |
Laser Range Finder(Velodyne®, FARO®, 北陽電機) |
| VR提示 |
Oculus Rift™, HTC Vive™, Hololens™, Tango™ |
| 3Dプリンター |
3D Systems Cube™ |
技術例
左右スクロールで表全体を閲覧できます
| 用途 | 技術 |
|---|---|
| 点群フィルタ |
外れ値除去, 移動最小二乗法, ガウシアンフィルタ, ダウンサンプル, アップサンプル |
| 画像処理 |
各種画像処理技術 |
| レジストレーション |
特徴量ベース, ICP |
| セグメンテーション |
Region Growing, モルフォロジー |
| メッシュ生成 |
Delaunay, Marching Cubs, 陰関数曲面, Greedy Triangulation |
| キャリブレーション |
Zhangの手法, 直接法 |
| 特徴量 |
AAM, Harris Corner Detector, haar-like, HOG, Gaborフィルタ, SIFT, SURF, Spin Image, SHOT, FPFH, PPF |
| 学習・識別・解析 |
主成分分析, 独立成分分析, ニューラルネットワーク, 最近傍法, K-means法, AdaBoost, ランダムフォレスト, SVM, カルマンフィルタ, パーティクルフィルタ, ベイズ推定 |
左右スクロールで表全体を閲覧できます
| キーワード | 3Dセンサー, RGB-Dカメラ, 点群処理, 画像処理, デプスマップ, 点群, 3次元計測, 3次元物体認識, SLAM, 空間再構成, 3Dスキャン, 動き検出・追跡, Point Cloud Library(PCL), OpenCV, Unity™ |
|---|
- *OpenGLは、Silicon Graphics, Inc.の米国およびその他の国における登録商標です。
- *WebGLは、Khronos Group Inc. の商標です。
- *Kinectは、米国およびその他の国におけるMicrosoft Corporationの登録商標または商標です。
- *Velodyneは、Velodyne LiDAR, Inc.の登録商標です。
- *FAROは、FARO Technologies Inc. の登録商標です。
- *SENZ3Dは、米国およびその他の国におけるCreative Technology Ltd.の登録商標または商標です。
- *Xtion PRO LIVEは、ASUSTek Computer Inc.の登録商標または商標です。
- *RICOH THETAは株式会社リコーの登録商標です。
- *360 Herosは、360Rize Inc.の登録商標または商標です。
- *Oculus Riftは、Oculus VR, LLCの商標または登録商標です。
- *HTC VIVEは、HTC Corporation の商標または登録商標です。
- *HoloLensは、米国 Microsoft Corporation の米国及びその他の国における登録商標または商標です。
- *Tangoは、Stratasys Inc.の登録商標または商標です。
- *Cubeは、3D Systems Incの商標及び登録商標です。
- *UnityはUnity Technologies Inc.またはその子会社の商標です。
関連情報
おすすめソリューション
画像処理・音声処理に関わる研究から開発・事業化までのお客さまの様々なニーズを、これまでに蓄積した技術・ノウハウとコンサルティングベースの課題解決アプローチにより支援します。
蓄積された技術・ノウハウとコンサルティングベースの課題解決アプローチによりお客さまの計算処理に関わる高速化ニーズにお応えします。